Some basics about CV to get you started
Logistics
** QUIZ ** TODAY
Computer Vision
Seeing ==? Vision
- We focus here on cameras
- Ignore other kinds of “seeing” such as touch sensors or LIDAR.
- A lot more than taking pictures
- Can be used for:
- Mapping
- Localization
- Object recognition
- Trajectory Estimation
- Driver Distraction
- Redundancy
Camera Types: Regular (webcam-like)
- RGB images
- Video is basically a stream of images
- Frame rate: How many images sent per second
- The higher, the more bandwidth and CPU is used
- Usually it is treated just that way
- Each image is analyzed individually
Other light bandwidth cameras
- infrared, etc.
- Not common
Depth cameras and other special cameras
- Mobile phone facial recognition
- Microsoft Kinnect
- Many others
- Conceptually, In addition to R,G and B, each pixel has a number saying how far away that surface is
- Also, “AI” Cameras like HuskyLens
Considerations
- Resolution of image
- Power requirements
- Fixed direction or sometimes a swivel
- ROS needs to know how the cameras position and direction relates to the overall robot base
- Another job for TFs
- What would happen if this information is incorrect?
- Where do the images have to be “sent” to?
Connections
- USB, direct to Raspberry Pi
- Image needs to be viewed through unix utility
- Which is not always easy
- Bandwidth and speed of connection
Role of TFs
- What is the likely TF that would be needed?
- What would that tell us?
Computer Vision (CV)
- Recognizing: faces, locations, fiducials, gestures
- Image processing: filtering colors, isolating shapes etc.
- Machine Learning (ML): Statistical analysis of tagged images
Code
NoteBurger TB3 in Gazebo does not have a camera! Must use Waffle
roslaunch prrexamples linemission.launch model:=waffle- Look at cvexample.py
Image Properties
- Images are stored in arrays
- Top left pixel is 0,0
- Bottom right pixel is m,n
- Each element of this array is another array, with the values for that pixel
- And that depends on the image encoding.
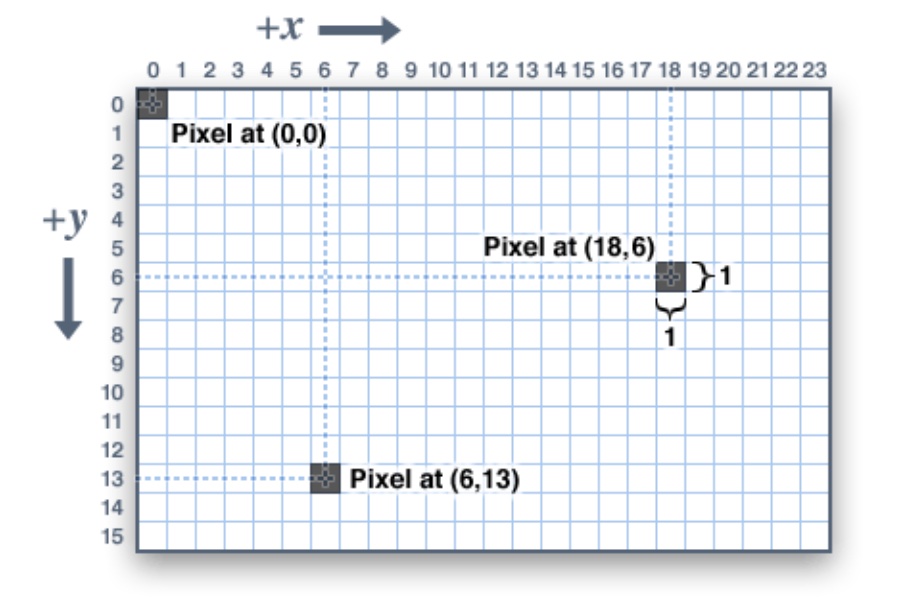
Image Encodings
- Usually each component is an integer from 0-255
- Zero means none of that component; 255 means the maximum of that component
- The first three components determine the color
- There can be more components, e.g. distance, or transparency, or others.
- Generally you can freely convert between encodings
Encoding for color: RGB
- RGB - Red, Green, Blue
- Like mixing colored lights. 100% of Red + Blue + Green gives white
Encoding for color: HSV
- HSV - Hue, Saturation, Value
- A little more subtle. You have to practice your eye
- Hue is the color where all colors are arranged in a rainbow from 0 to 255
- Saturation is how “pure” or “saturated” that color is
- Value is how “bright” the color is
- Sometimes its easier to think in terms of HSV
# Simple manipulations
tl_pixel = image[0][0] # top left pixel
r_channel = image[0][0][0] # 'R' channel of top left pixel
cropped_img = image[120:240, 0:320] # crops the image to be only the bottom half
Image processing with OpenCV
- OpenCV is the key library used for image procesing in ROS
- It is totally distinct from ROS but great bridging functions exist
- The current version is OpenCV2
Basics to understand
- Understand representations of images as 2+ dimensional arrays
- Understand that a given image “array” will have image information encoded
- There are different encodings which change what is stored at the innermost array
- Monochrome, Depth, RGB, HSV, and more
- Different OpenCV functions expect and generate images of specific types
Connecting OpenCV to ROS …
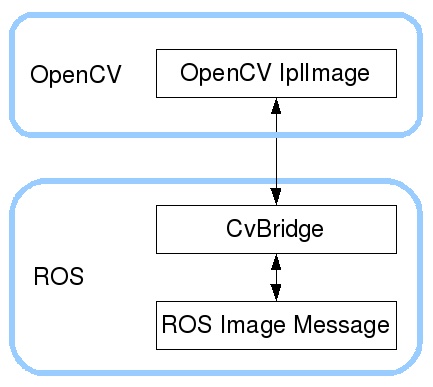
- CvBridge() provides a series of methods that convert from ROS messages to OpenCV2() formats
- And vice versa
- e.g.
CvBridge().imgmsg_to_cv2(msg, desired_encoding='bgr8')
How to think about algorithms
- They are a series of distinct steps (e.g. a
pipeline) - Often, given an image, transform it, to a different image
- The order really matters
- Sometimes, given an image, analyze it, generate data (a number, an array, a list, etc)
 (random Image from picsum.photos)
(random Image from picsum.photos)