Reminder: Readings are your responsibility. You will be expected to come to class prepared, having read the material, and ready to participate in the discussion
## Logistics
- Overall impressions of wall follower submisions
- Many algorithms looked similar. This is likely because of google, chatgpt, or student cooperation
- And if that’s as far as it went, that’s perfect
- You found that algorithms that work in sim dont work as is in real life. This is a well known fact.
- The sim is never going to reproduce the quirks of a TB3
- Try to modularize more
- Write functions, methods, classes or nodes to represent separable algorithms
- Especially Nodes
- Lets slook at the Lidar Scan Message a little closer.
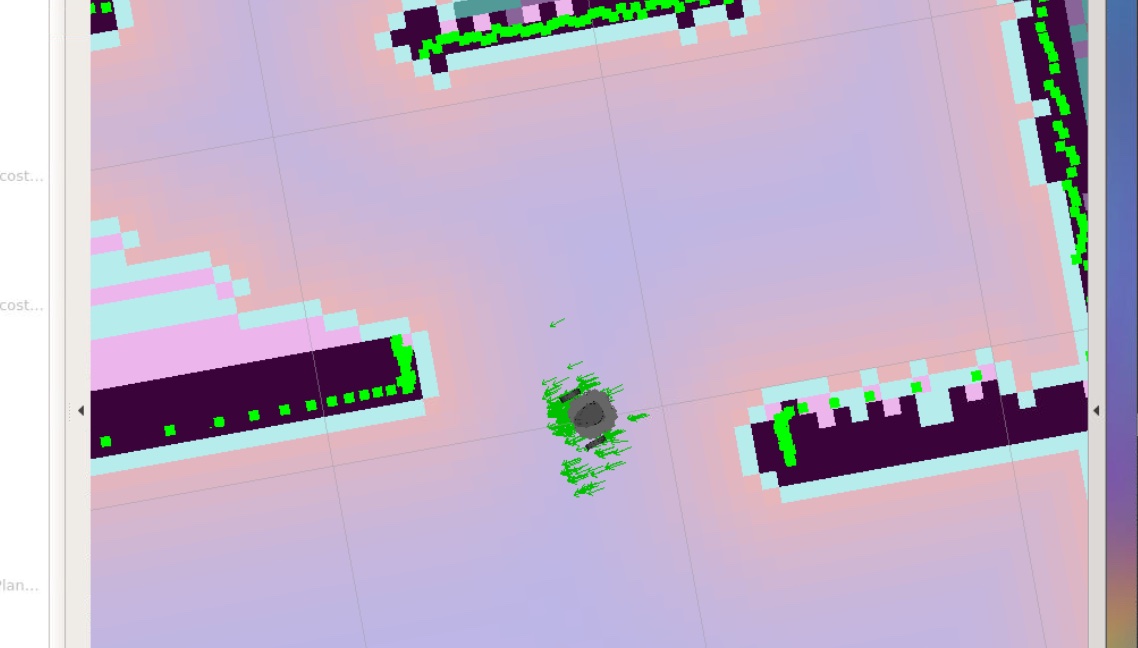
Localization
AMCL Particles Display
Monte Carlo
- AMCL: Advanced Monte Carlo Localization** (I’ve also seen “Augmented” and “Adaptive”. Go figure.)
- Why Monte Carlo? That’s where the Casinos are!
- Algorithms that incorporate random guesses when a direct solution is hard or not feasible
- Diagram on the board how you would calculate Pi using a Monte Carlo Algorithm
- Note for
PI it’s a very inefficient way to get an accurate result
- But it illustrates the idea of Monte Carlo estimation
Particle Filter
- Lets watch a short Video About Particle FIlters
- Markov localization means that the new state is dependent only on the previous state (and not the history) and that the probability distributions are
- Markov localization = state estimation from sensor data
- Instead of “solving” the equation for all data and all points
- Use a Monte-Carlo technique
- Generate a random collection of candidate locations
- Compute the motion
- Adjust the probability of each particle
Further references
Thank you. Questions? (random Image from picsum.photos)
(random Image from picsum.photos)