Reminder: Readings are your responsibility. You will be expected to come to class prepared, having read the material, and ready to participate in the discussion
Projects
- Tip from an article
- For outdoor localizatoin
- QR Code (not feducial) with the true GPS location encoded in the QR code
- Project Major Milestone
Kalman Filter?
- Kalman “Filter” is a mathematical algorithm
- It estimates the true value of an uncertain measurement
- Kalman filters are ideal for systems which are continuously changing
- Given noisy inputs, for example, GPS, Odom and/or IMU
- Calculate, for example, the actual speed of a robot, or the true location of a robot
- Makes an “educated guess” about what the system is going to do next.
What question does it try to answer?
- Given uncertain sensor data
- And uncertain state information
- And uncertain control inputs
- And uncertain measurements
- How do you get the best possible estimate of the state?
- Well supported by math and statistical analysis
- One key insight two inaccurate readings can be combined into an estimate that is more (not less) accurate than either one alone.
- Assuming errors are truly independent
Learning about Kalman Filters
- There is a lot written about it
- Because it is difficult and important
- The explanations are not consistent and don’t use consistent nomenclature
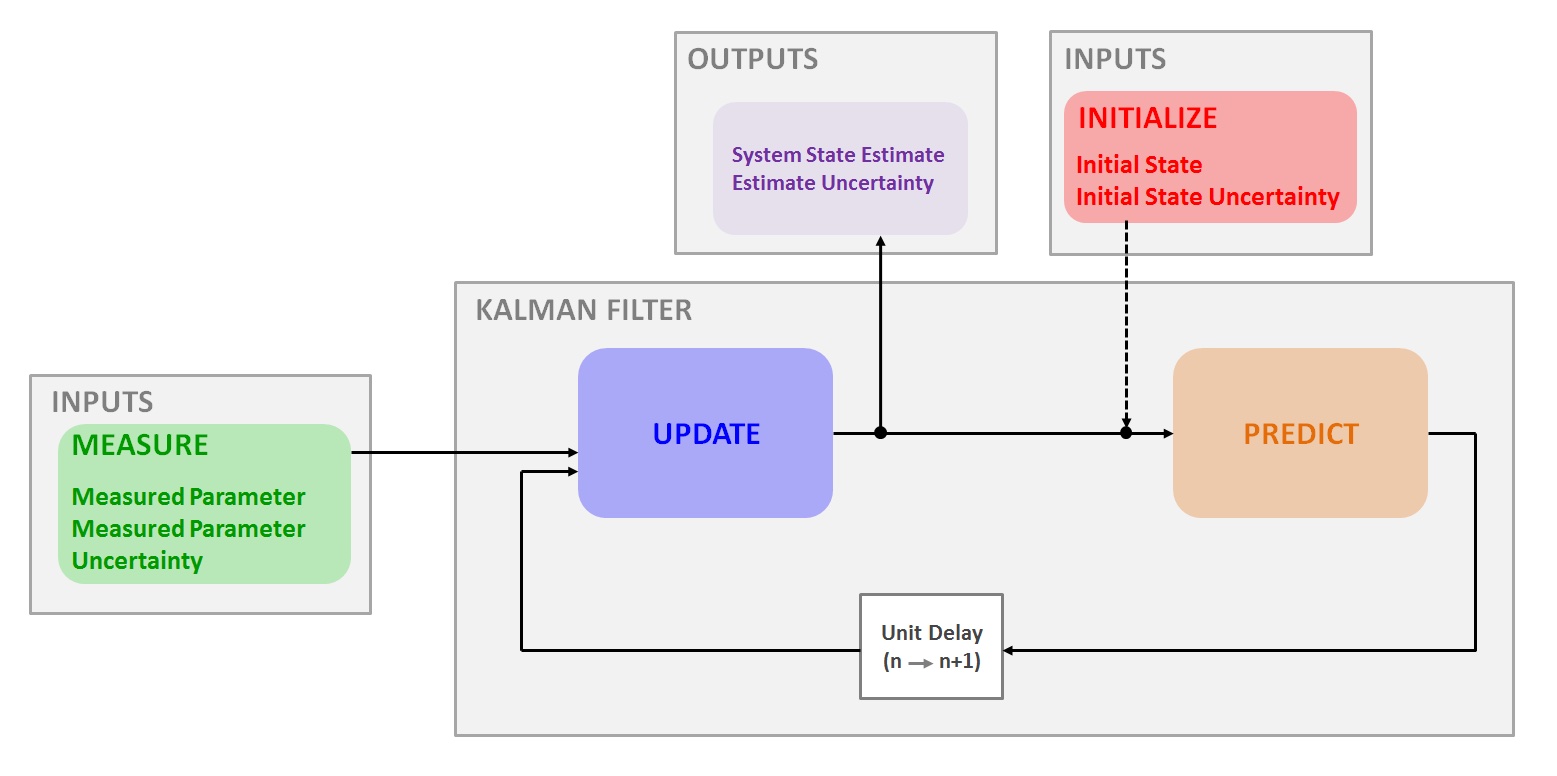
State Estimation
- Kalman filter is an iterative model
- Each loop tries to make the ESTIMATE of the state more accurate
- By processing data from SENSORS (which are statistically characterized)
- And considering known control inputs (which are statistically characterized)
- And unknown perturbations (which are statistically characterized)
- Producing an updated estimate (which is statistically characterized)
- The loops happen at intervals that correspond to the rates that sensors are read
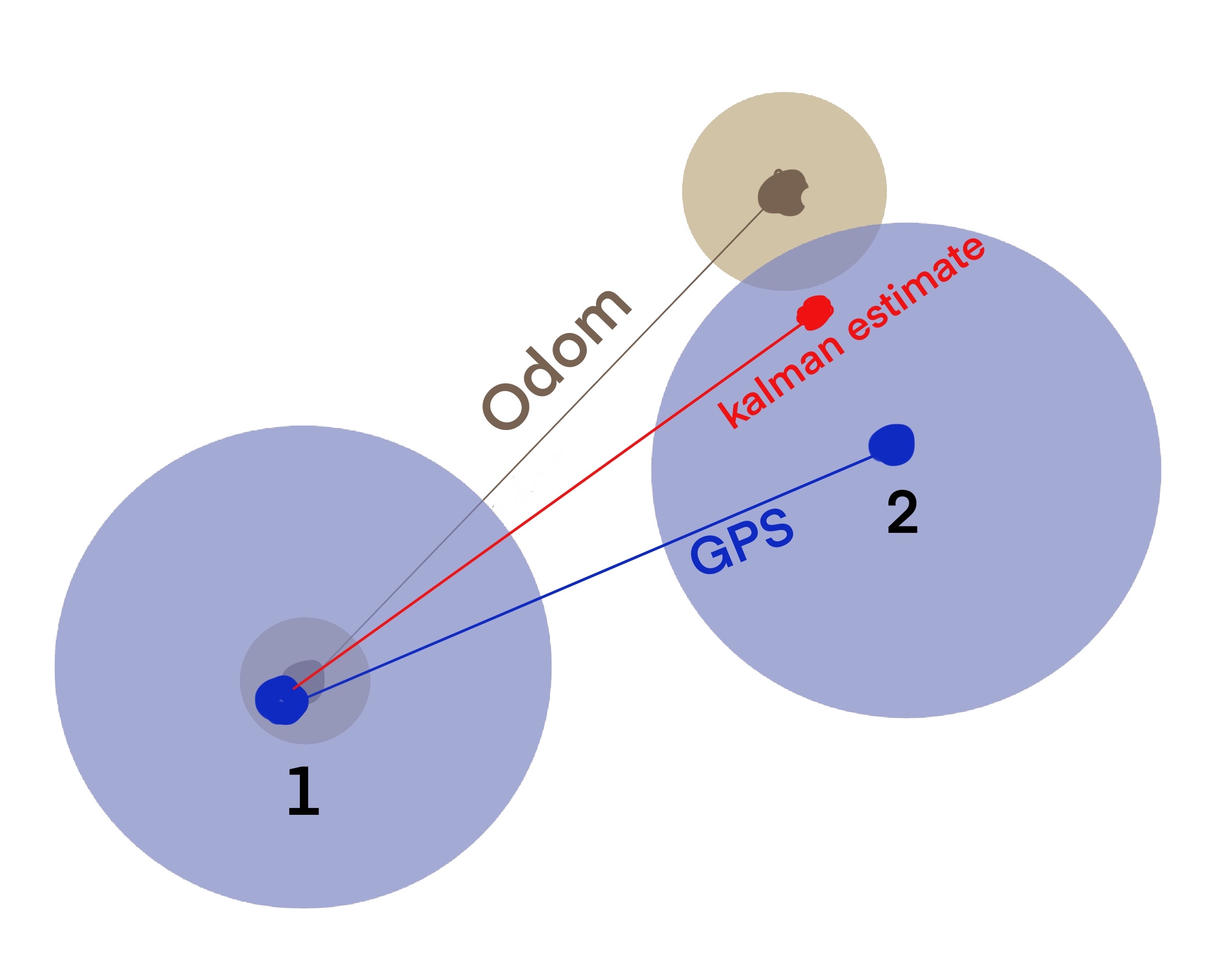
Scenario
- An off-road robot moving around a field
- Using GPS for localization - which has a known inaccuracy on the order of 5-10 meters
- The robot can be asked to move forward or turn at a specified speed or be stationary
- State: position and velocity
- Control: motion commands
- Sensors: GPS … odometry?
Kalman estimate
Why care?
- Sensors are everywhere in robotics
- Sensors are known to be inaccurate
- Kalman filters are a family of algorithms *that give us
- More accurate estimates by combining readings with known error rates
- They are efficient and they work
System
- Kalman filter looks at a “system” which has a “state”
- The system state may change over time
- Based on it’s own internal operation
- Based on “control” input from the outside
- Noise or pertrubation
- We gain information about the “system”
- By sensing data which allow us to infer system changes
Kalman Filter
State model
- Based on what is known about the system
- We can make a first guess of how the old state would change each step
- In other words, if I am at x=0 and I am moving at 1cm / second
- Then 1 second later, I am at x=0.01
- “all things being equal”
- (Note the conceptual similarity to AMCL)
State (X)
- a vector (set) of numbers representing the state you are trying to measure (e.g. location)
- Vector/Matrix representation is for ease of calculation
- But it can also make things look more complicated (for some people)
- Usually denoted by X, containing numbers, here are a series of examples
- current x or y position
- current speed in the x or y direction
- current distance from obstacle
- current altitude from the surface
Covariance Matrix (P)
- A way to express the confidence in each component of the state
- And the known correlation between them (Σ)
Control Model
- Look beyond the internal of the system, what is telling it to change?
- Control input:
- Driver steps on break or accelerator
- Gravity is pulling the ball downhill
- cmd_vel is telling the robot to stop
- The control model determines the next state given the current state and the control input
- Note: The model often has a random component called process noise.
Sensor Model
- Given a measurement from the outside world
- Important: what is the reliability of the sensor (from spec or empirical measurement)
- How does the state model change
1D Scenario: bathroom scale
- Using a scale with a known error rate
- Sensor generates 10 readings per second
- You know that the weight won’t change (ground truth)
- What do you use? Average? Moving Average? Or?
- What if you have thousands of measurements (10 per second, like a bathroom scale)
- Models:
- State: unchanging (objects weight is not expected to change)
- Control Inputs: (is an outside agent acting to change) None
- Measurement Model: (how accurate is the sensor)
- Update: What is the weight estimate now?
- In this situation the Kalman filter does not have an advantage over a simple moving average
- Why?
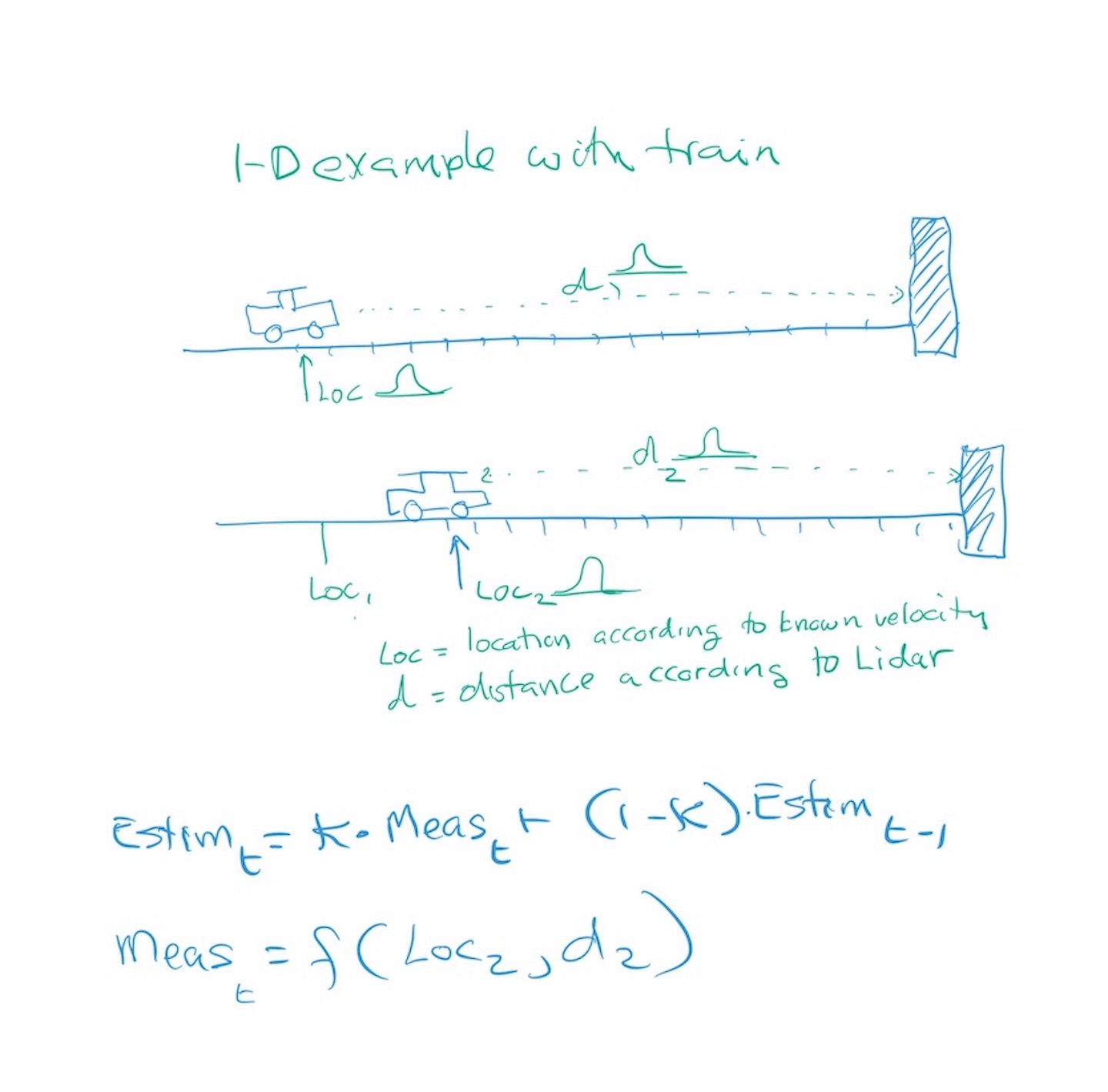
1D Scenario: Train
- A train is on a track and moving towards the terminator (which is a block)
- Train has a lidar sensing the wall
- We have a reading the speed based on the rotation of the wheels
- How does the train determine where it is?
- Models:
- State: Location and Velocity. Location changes a known amount each T
- Control Inputs: (is the driver stepping on the gas): No expected change
- Measurement model: (How accurate is the Lidar supposed to be)
- Update: What will be the new location and velocity estimate?
Kalman Train
Abstraction of the Kalman Filter Equations
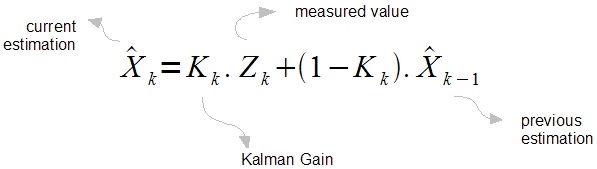
Diagram of Kalman Filter Equations
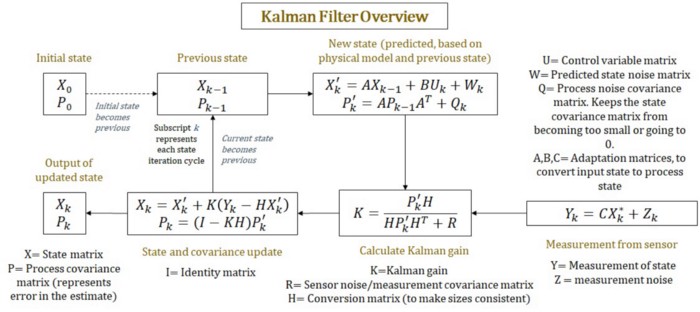
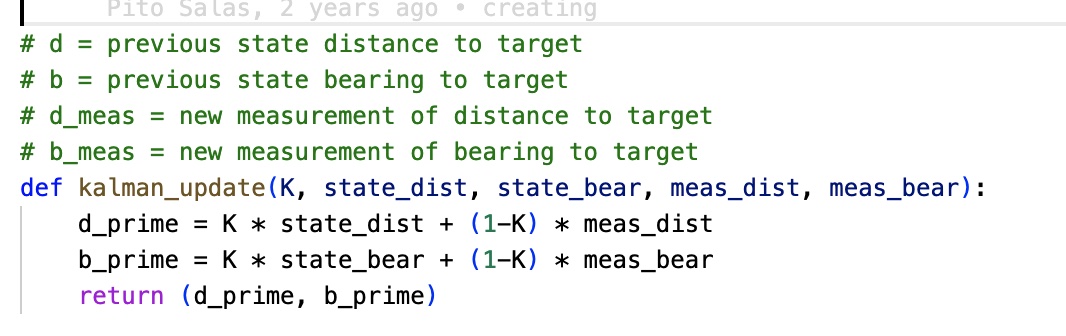
Kalman Gain
- Where does the Kalman Gain come from?
- There are complex equations which use the covariance matrix with the estimates to compute a Kalman Gain
- But I’ve seen examples that skip that and use a constant
How to understand
- Most examples you find will use linear algebra (not an expert) and store things in matrices
- If the
state is location and velocity in the x direction (a falling ball) that is stored in a 1x2 matrix
- This simplifies the expression and calculation of the formulas but it is initially confusing
- That is unless you are fluent in matrix and linear algebra which I am not
Links for further study
Thank you. Questions? (random Image from picsum.photos)
(random Image from picsum.photos)