Introduction
- How can the robot follow lines on the ground?
- Acquire images
- Filter the images
- Steer the robot
Acquiring Images
- Message:
sensor_msgs/Image
- Run Gazebo to simulate a robot with a camera
- Since the TB3 Waffle has a camera, we will use those models, and then run gazebo
# Set model to WAFFLE!!!
$ export TURTLEBOT3_MODEL="waffle"
$ export TB3_MODEL="waffle"
$ roslaunch turtlebot3_gazebo turtlebot3_world.launch
$ rostopic list | grep /camera
- Note all the camera related topics being published
- The image itself can be found under
/camera/rgb/image_raw
../compressed is good for sending the images over wifi../theora applies even more compression
Look at image
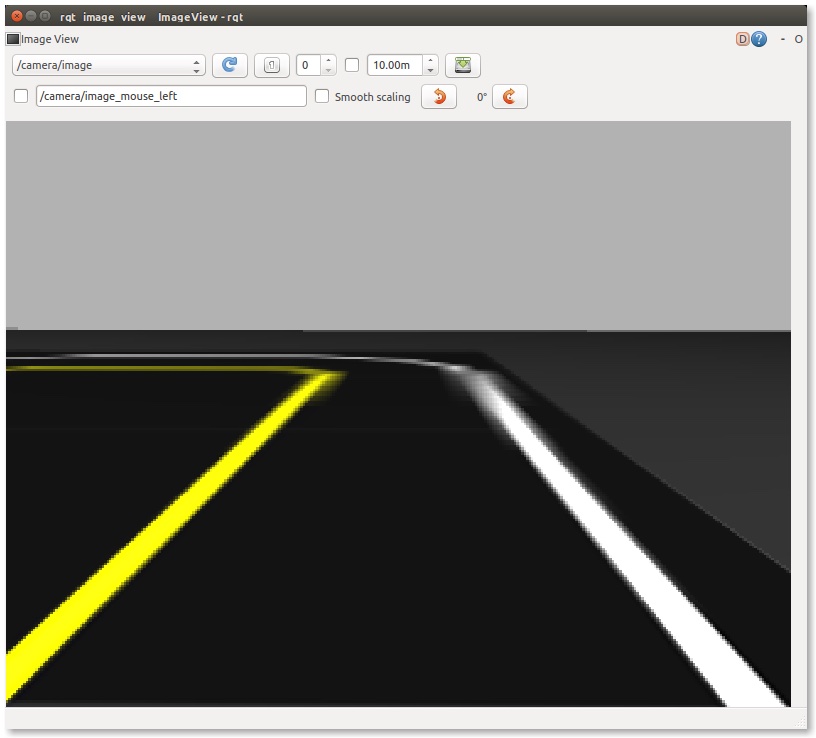
- Lets visualize the image
- Choose from each of the topics relating to the camera
- Move the robot in Gazebo and watch the picture change
$ rqt_image_view
Run the simplest program
$ rosrun samples follower.py
$ rosnode samples follower
--------------------------------------------------------------------------------
Node [/follower]
Publications:
* /rosout [rosgraph_msgs/Log]
Subscriptions:
* /camera/rgb/image_raw [sensor_msgs/Image]
* /clock [rosgraph_msgs/Clock]
Services:
* /follower/get_loggers
* /follower/set_logger_level
contacting node http://10.0.0.95:39103/ ...
Pid: 17179
Connections:
* topic: /rosout
* to: /rosout
* direction: outbound
* transport: TCPROS
* topic: /clock
* to: /gazebo (http://10.0.0.95:42857/)
* direction: inbound
* transport: TCPROS
* topic: /camera/rgb/image_raw
* to: /gazebo (http://10.0.0.95:42857/)
* direction: inbound
* transport: TCPROS
- First section is information determined from roscore about what /follower is doing
- Second section is information directly from the /follower node about it’s connections
- We see that it is publishing to /rosout
- And is subscribed to
/clock (from gazebo)
- And
/camera/rgb/image_raw (from gazebo too)
- Lets find out the frame rate (simulated by gazebo)
rostopic hz /camera/rgb/image_raw
subscribed to [/camera/rgb/image_raw]
WARNING: may be using simulated time
average rate: 10.204
min: 0.019s max: 0.131s std dev: 0.03037s window: 10
- So, we are receiving about 10 images per second
- Which is why my computer is so slow :)
Race Course
NB: We diverge from the book a little. Note different roslaunch
- Kill everything from before
- Load a new world into gazebo
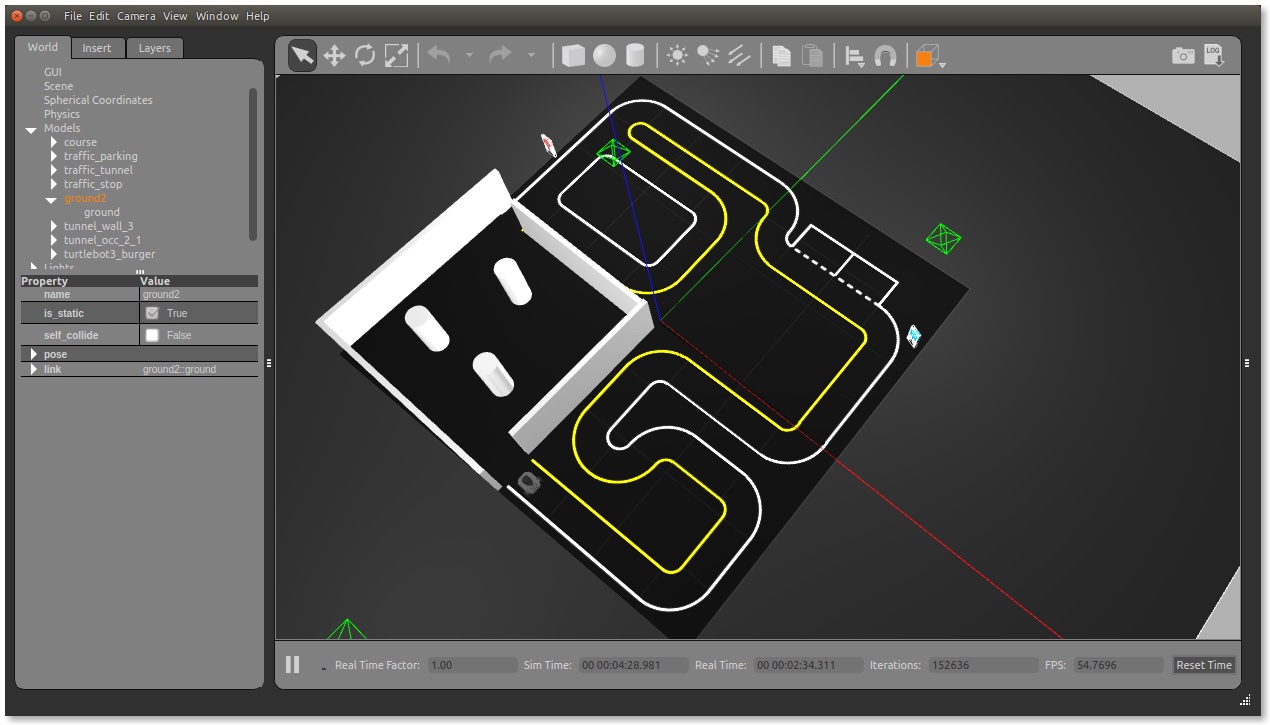
$ roslaunch turtlebot3_gazebo turtlebot3_autorace.launch
- You will see in gazebo, a TB3 Waffle on a little racetrack
- Here’s the track, and the view from the camera:
Introducing OpenCV
Detecting the yellow line
- Image and Pattern Recognition is arbitrarily complex
- Here we will take a simplistic approach
- An interesting relevant link: Tracking Colored Objects
- Note that we customized the values to recognize yellow as
HSV [40,0,0]:[120,255,255]
- These values are very rough and could be improved
$ rosrun samples follower_color_filter.py
- Will display three windows: the original image, the mask and the original as masked
- We will really only need the masked image
Now, use yellow line to pick a direction
- First we take a 20 pixel slice near the bottom of the filtered image, which contains ony the yellow line
- We process the image further to locate the “centroid”
- And we paint a red circle there to show where that is
- Notice that while the image is still, its actually being regenerated 10 times per second, once for each frame. Move the robot manually in Gazebo to notice this.
$ rosrun samples follower_line_finder.py
Actually following the line
- We will use the location of the centroid
- We offset it because the yellow line is not in the middle of the road
- We move the robot forward and give it a little turn
- Based on how far from the middle the centroid is
- Notice this is a PID controller!
$ rosrun samples follower_p.py