Navigation
- Continuing from where we left off
- We have created a map using slam
- How do we use it for navigation?
SLAM
- Simultaneous Localization and Mapping
- We wil`l localize the robot on a map that is incomplete
- When it leaves the map it is able to extend it with the same algorithm
Reconstruct where we left off
NB Be careful with the filenames of the map. You will get strange errors if the file name given to turtlebot3_navigation is incorrect or not resolvable!
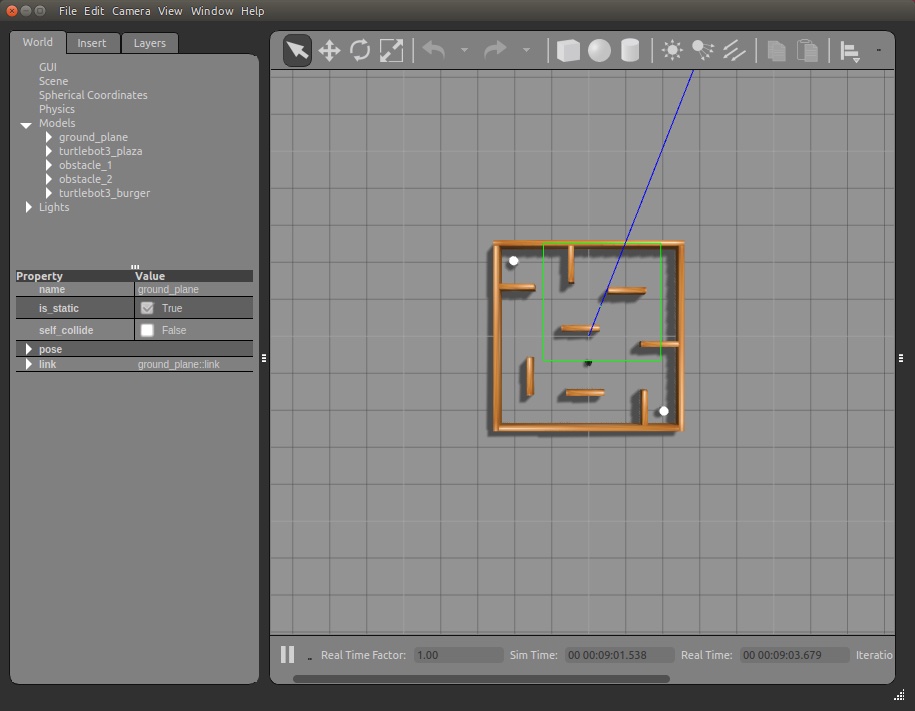
# create the simulated environment called stage_4
$ roslaunch turtlebot3_gazebo turtlebot3_stage_4.launch
# launch a simulated turtlebot3 that drives a random pattern
$ roslaunch turtlebot3_gazebo turtlebot3_simulation.launch
# launch the slam algoritm, which will create an in-memory map data structure
$ roslaunch turtlebot3_slam turtlebot3_slam.launch slam_methods:=gmapping
# After the map looks done, save it into a map file for later.
$ cd ~
$ rosrun map_server map_saver -f stage4
Navigating
# Now, close all the exiting ROS nodes down and next run this. Be careful with the
# file names because the yaml file contains a file name too and it is easy to
# get things misaligned.
# {filemname} will be something like /home/youraccount/stage4.yaml but check to make sure.
$ roslaunch turtlebot3_gazebo turtlebot3_stage_4.launch
$ roslaunch turtlebot3_navigation turtlebot3_navigation.launch map_file:={filename}
Navigate
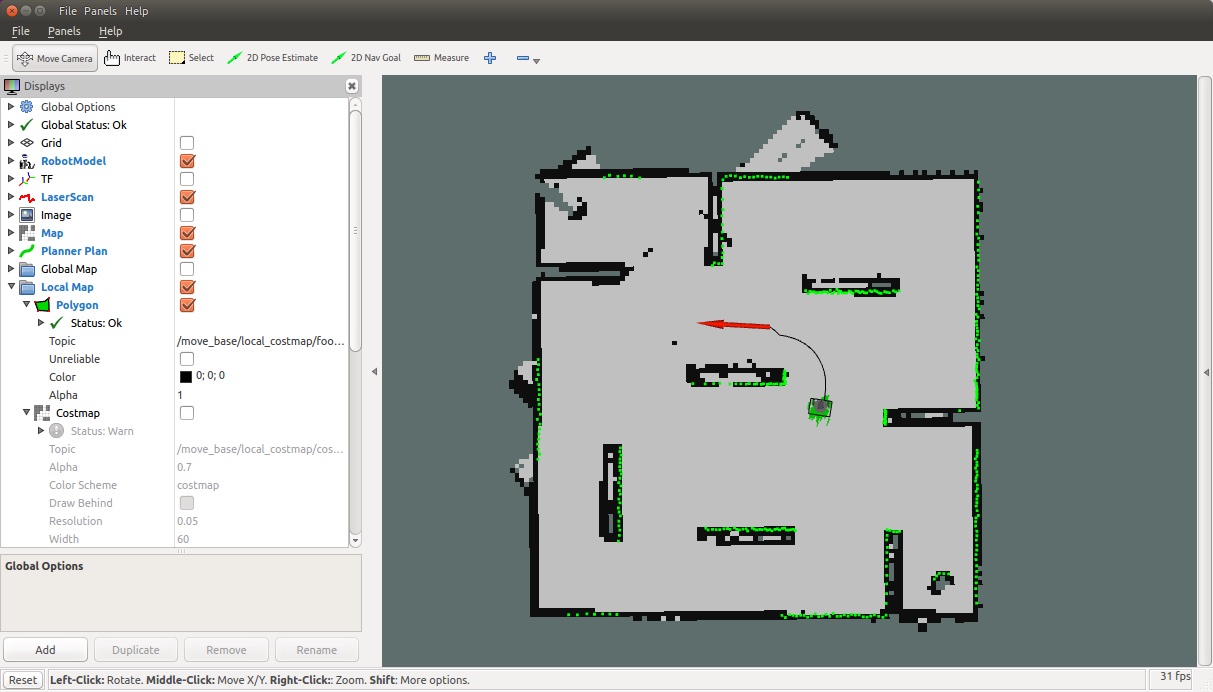
- Give the robot an estimated position
- Give the robot a navigation goal by clicking the button in rviz
- Play around and see the robot solve the simple maze navigation including places it can’t ‘see’ from where it is
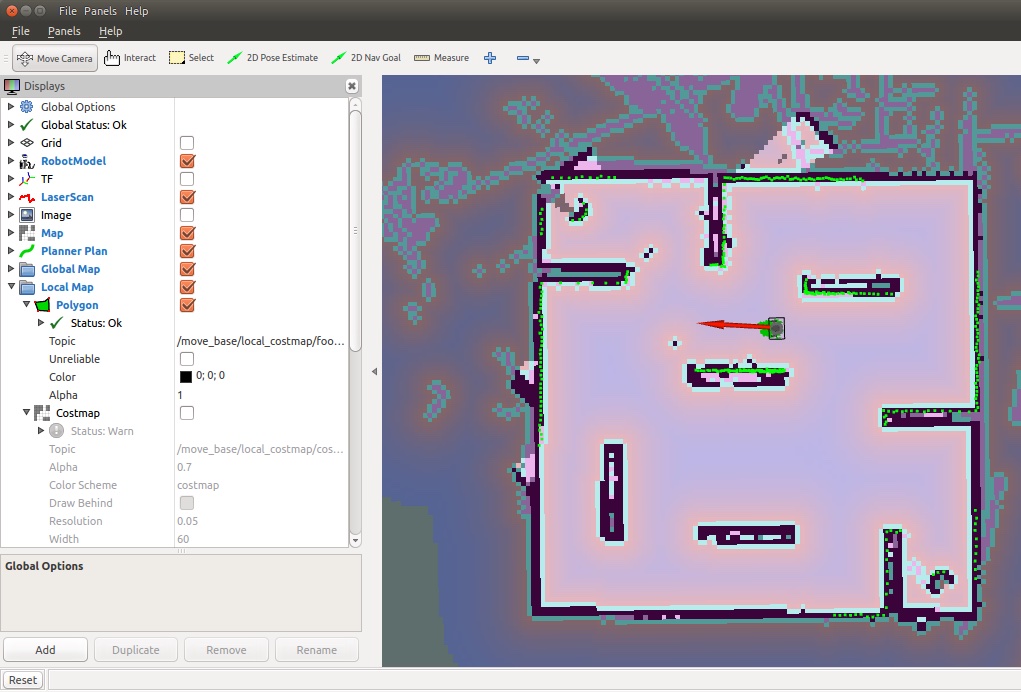
Explanation
- The ROS nav stack is another complex bit of computer science, mathematics, and engineering
- For now we are going to just scratch the surface
- Inputs are a map, an estimated current position, scanner information, and a destination
- Behavior is to generate a path and steer the robot to it
- Avoiding obstacles
How it works
- navigation goal is sent to the nav stack. This is done with an action call with a goal of MoveBaseGoal which specifies a target pose and a coordinate frame (called the map frame.)
- Nav stack uses a path-planning algorithm in the global planner to create shortest path route
- Local planner drives along that path, while using sensor information to aboid obstacles.
- When the robot arrives at the goal pose the action terminates.
AMCL
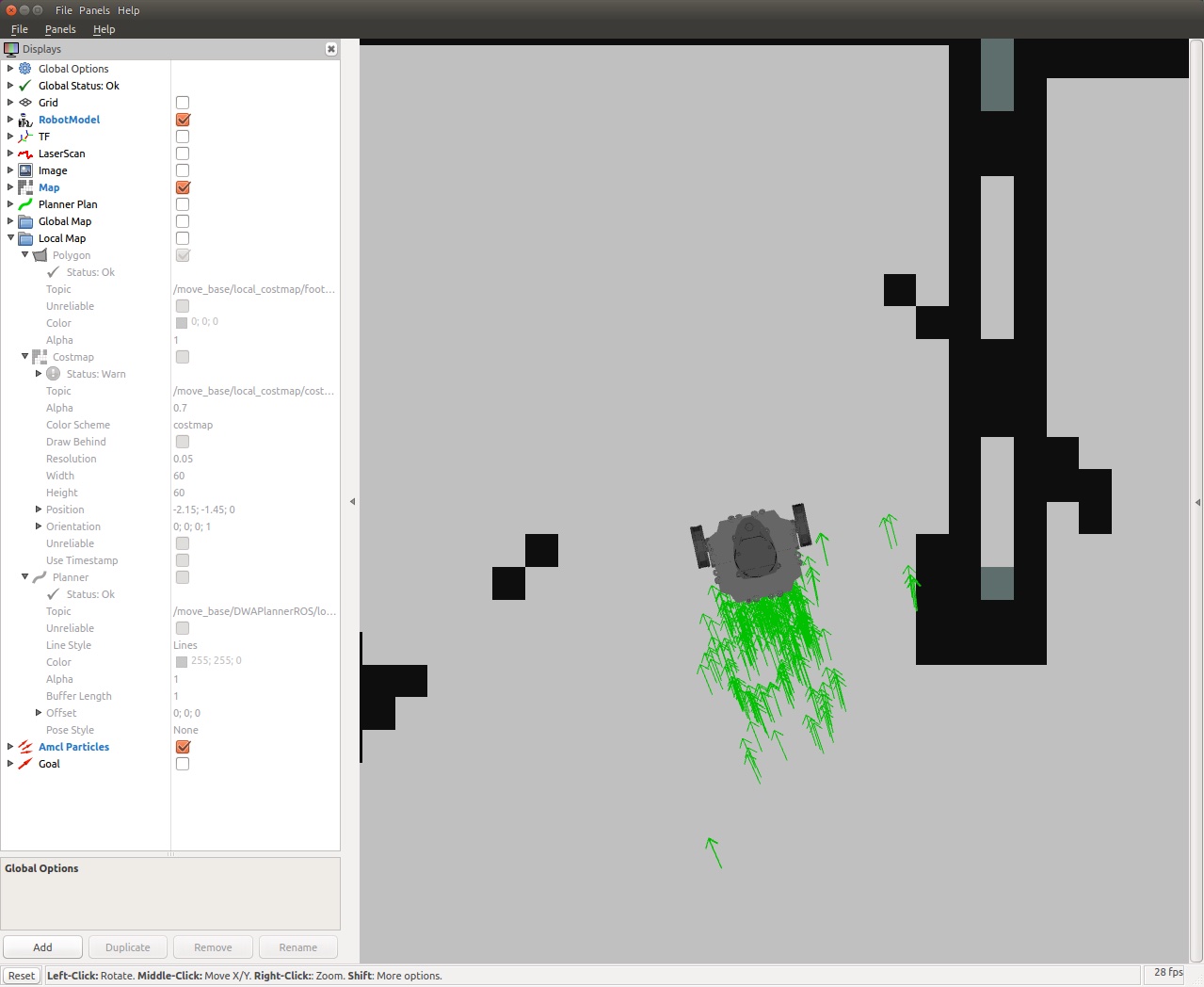
- Uncheck everything except RobotModel, Map and ParticleCloud in rViz.
- The green arrows are the pose estimates from
amcl
- Tell
amcl that the robot is somewhere else, and you see it do its best on guessing the pose
- Do this with the 2d pose estimate command
- Turn on the Laser Scan display
- Play with the 2d pose estimate command and observe how the map becomes aligned
- Also with
/initialpose topic (which is how, perhaps, we tell AMCL about a fiducial that has been identified.)