Purpose
Solving a maze is the logical next step after you have a working wall follower. However it will challenge the wall follower to deal with scenarios that it might not know about yet. Like a dead end, or outside corners, and so on. The assignment will touch on most of the basics that we’ve covered so far and it will give you a real chance to show off what you’ve learned.
Skills that you will practice
- ROS App: Basic structure of a ros app”
- roscore: ROSCore and Nodes
- launch and run: Launch files, bringing up robots, running with simulation
- Motion: Control motion with cmd_vel
- Pubsub: publish and subscribe
- sensing: sensing with lidar and odom
- calc: Algorithms, calculations and state management
- Debug: *Finish, debug, and get an app to work”
Expectations
- Successful and correct wall follower from the previous assigment. Very important that you actually understand it!
Resources and Tips
- Maze Escape with Wall-Following Algorithm: A practical guide on how to approach the problem.
- Design a Line Maze Solving Robot: A set of slides that elaborate a bit more on maze-solving methodology.
Assignment Specifics
- This programming assignment requires you to develop a maze solver and demonstrate it in simulation as wel as with a real robot
- We will construct a simple maze in the lab and provide one in gazebo as well
- In both examples, the robot will begin in the middle of the maze and find its way out.
How to Run
See videos of sample solutions for simulated
and real
Running in Simulation
roslaunch maze_solver maze.launchrosrun maze_solver maze_solver_sim.py
Running on a real robot
bringup (onboard the robot)rosrun maze_solver maze_solver_real.py
Tips and thought process
Wall Following: The wall-following algorithm can be the basis of the solution, but it is not the only one. And even if you use that, going around corners or handling dead ends will need special attention. But you are encouraged to try different algorithms. You can find tons of algorithms online. Feel free to use any of them. You can invent your own algorithm as well. You are free to refer to hints for inspiration, and are encouraged to experiment with novel ideas. Wall following is tricky because depending on how you do it, it might oscillate back and forth. You should consider using PID Control to smooth out the behavior
For this assignment, you can choose to modify your wall following algorithm from the previous assignment to run the maze. Keep in mind the width of the corridor when you make your adjustment. Some of the places which the algorithm might struggle can be: corners, dead-ends and invalid lidar reading when the robot is too close to the wall.
One of the most successful approach from the students of previous years is the ‘longest distance algorithm’, which looks for the longest unobstructed distance using the lidar and solve the maze by repeatedly finding and moving to the location where the distance between the robot and the location is the longest.
Design Notes: Break the problem down into smaller parts. This is standard programming practice. Think about situations that robot may find itself in, and how it should behave given that circumstance. Note that as you are following a wall, you need to notice when the wall suddenly disappears and at that point you have to turn to keep following it. Conversely the robot might be in the middle where all walls are far and as far from it, in which case you have to just drive until you get to the wall and then start following it.
right (or left) hand rule: The easiest approach is to have the robot find the wall on the right and follow it and eventually it will get to the exit. We promise that the maze will not have any loops in it. While the right hand rule always works in this situation it does not necessarily find the fastest way out.
Solving the maze: Once you have a handle on following the wall, you next have to consider how to use that to solve the maze. The obvious approach is the “right hand rule”. Put your hand on the wall on the right and walk, never let go and eventually you will come out - as long there are no walls
Other sensors: You may find that the /odom topic has some useful information to help solve this problem. Odometery is not required to solve this problem, but it could lead to a more robust solution if used correctly. A totally different option which has never been attempted is to use the robots camera to help find the way. In this solution it would be allowed to ensure that the floor has a totally different color from the walls by using colored paper.
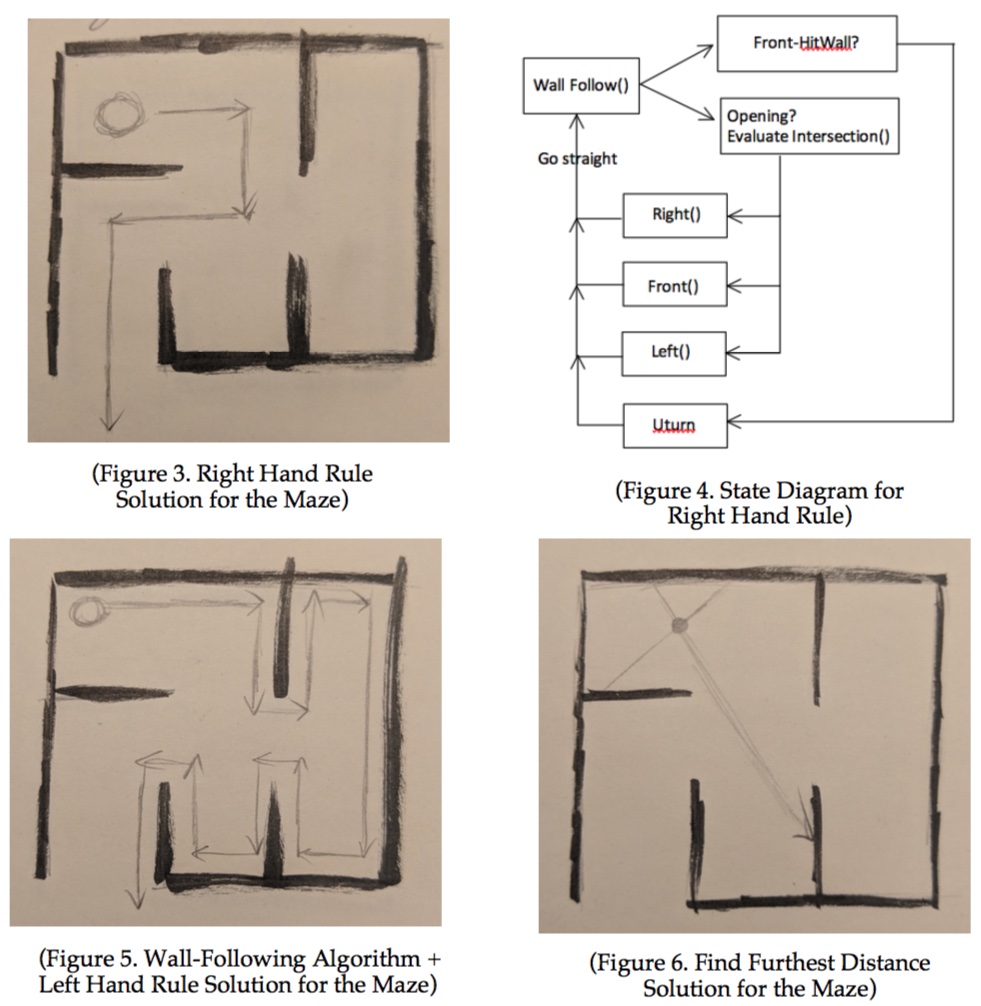
Other ideas: Imagine that from where the robot is positioned it can “see” the exit even if there are other walls and doorways in between. That exit will be the longest unobstructed view. You are welcome to google for other ideas as well.
Deliverables
Filled in by Ephraim (ezimmerman@brandeis.edu for questions)
Please follow the following steps for a successful submission:
Video submission:
- Record your video submission.
- Upload the video file to Google Drive and ensure that “Anyone with the link” is selected on the sharing tab.
- Copy/paste this link as an inline comment below the import statements in the maze_solver_sim.py file. DO NOT remove the
#!/usr/bin/env python3 present on the first line of the code.
Code submission:
- Navigate to
/my_ros_data/catkin_ws/src/cosi119_src in your cluster account VSCode view.
- Compress the assignment:
zip -rv maze_solver_<brandeis email prefix>.zip maze_solver/. Replace with your email prefix. For example, ezimmerman. After you run the command, wait about 10 seconds, then refresh your browser. It should appear in your cosi119_src/ directory.
- The previous step will generate a .zip file. Right click it, then press download. This will download the files onto your machine.
- Upload the zip file, named, for example, maze_solver_ezimmerman.zip, to the Moodle submission. We recommend opening the zip and making sure all of your files are there (and the compression is not corrupted).