PID Control
- PID is a well known technique for smoothing out control, to avoid oscillation. PID stands for
- Applying PID control to your algorithm will make it more robust and perform more consistently. When used with a wall follower it will help better follow the wall without too much fluctuation.
- It will make the robot turn at a higher speed when you are too away from the designated route (too far or too close to the wall), and turn at a slower speed when you are close to it.
Example Code
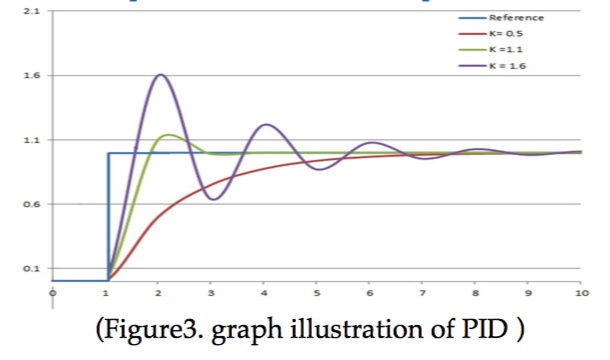
Graph
Nice video
Here are some great links. You will be amazed at how well this works.
Some nice links