Reminder: Readings are your responsibility. You will be expected to come to class prepared, having read the material, and ready to participate in the discussion
Logistics
Next class: QUIZ!
- In class, no web, no book
- No coding nor memorizing of APIs
- It will be technical
- If you have attended (to) class, did the readings, and completed the PAs
- You should have no trouble
Student Lab Manangers
- Can’t decide on term, used to be Deputy TA
- Currently:
- Vendashi: vedanshi@brandeis.edu
- Artem: artemlavrov@brandeis.edu
- Sam: samuelherman@brandeis.edu
- Looking for a few more!
- If you want to be considered as a Student Lab Manager, send me an email
Expectations for the Term Project
- You will be using the lab outside of formal lab times
- Coordinate with the TAs and Student Lab Managers
- Starting now the majority of your “homework” will be your term project.
- Expect 5-10 hours a week per student
- This is work outside the classroom (and also outside lab time)
- You will need to plan and manage your time to achieve this
Review of Slam
- An algorithm that builds up a map while collecting sensor and analyzing it statistically
- The map as it is being built is published by the map_server
- You can save the map to a file so that it remembers it to the next run
- Map Consists of a grid of “costs” (costmap) and a coordinate system
- Map server “publishes” the map on the /map topic
- Costmaps are actually multi-layered
Navigation
- AMCL: Given lidar sensor data and a map, estimates the true location of the robot
- Calculation is reset when amcl receives a new pose_estimate
- This estimate is different from /odom (why?)
- AMCL publishes a /tf transform between /map and /odom (note this is the “highest probability” location)
ROS Actions
- Built on top of ROS Topics
- Used for the key navigation service,
move_base
- Actions implement a protocol where a node (requestor) can request a long-running action from another node (actor)
- Compare with topic publishing which are one-shot
- Requestor:
- Does not need to know anything about how to actor works
- Can ask to initiate an action (e.g. navigate to x,y)
- Can find out the progress or status of the action (which can take many seconds)
- Is notified when the action is finished, either successfully or unsuccessfully
- Actor:
- Receives the request from the requestor
- Proceeds to implement the action
- REports status as requested
- Reports completion, either successful or failure
- Book: 5: Actions
ROS Services
- Built on top of ROS topics
- Used as a way to allow a node to receive requests (synchronously) and return a response
- Also used as part of move_base.
move_base - The big enchilada of ROS Navigation
- Main entry point of ROS navigation algorithms
- Conceptually: move_base(x,y) - causes the robot to do it’s best to get to x,y
- But there must be a lot more to it.
Discussion: what else must be involved?
- A large diverse collection of packages and modules
- A sophisticated, pluggable architecture
- Allows for new algorithms to be designed and tested
- Parameterized for configuration
- Uses ROS “actions” to initiate, monitor, and report success
- Initial goal is: /MoveBaseActionGoal
Components of move_base
- Global Planner: Creates a plan from the current position (AMCL) to the goal position with respect to a map. May use any of a number of algorithms (including A*)
- Local Planner: Given the local map (built in real time from sensors), considers location and velocity and computes the near part of the plan.
- costmap-2d: General package to build, maintain, update and access a multi-layer 2d map. Used for both local and global maps and for other things
- Recovery behaviors: either map clearing or rotation recovery heuristics used when robot appears to be stuck.
FLows
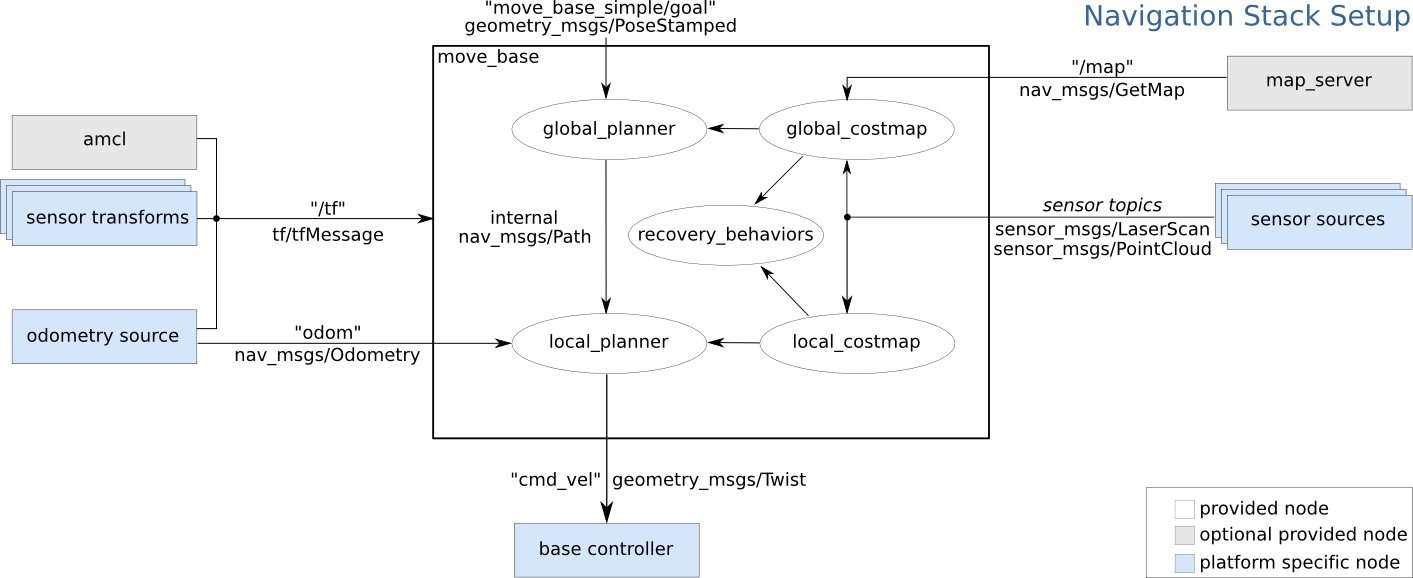
How move_base works - global planner
- Uses base_global planner to comnpute a path from current position to goal
- This plan is with respect to the global costmap (from /map topic and
map_server)
- Look at ROS global planner for visuals
- Interesting parameters:
/use_dijkstra (bool, default: true) # If true, use dijkstra's algorithm. Otherwise, A*.
/use_quadratic (bool, default: true) # If true, use the quadratic approximation of the potential. Otherwise, use a simpler calculation.
/use_grid_path (bool, default: false) # If true, create a path that follows the grid boundaries. Otherwise, use a gradient descent method.
How move_base works - local planner
- Create a local map grid from the local costmap) with costs representing distances to the final goal
- Uses base_local_planner to determine the next motion in the immediate future
The two book chapters
Topics for further study
Thank you. Questions? (random Image from picsum.photos)
(random Image from picsum.photos)