Logistics
- How to submit homework:
- SURPRISE: Do not put your name in the files. The names are automatically provided by Moodle.
- If there’s code, then it should be in a valid ROS package. Zip up that package and submit it.
- If there’s a document, report, ansewr to a question, then it must be a pdf.
- If there’s a video, then put the url of the video in a separate file called video.txt
- Summary: There will be between one and three files in your submission.
- Whoops, next Friday is also no-class, so, no-lab!
- Should we present project ideas on Thursday or a week from Friday?
Review
- An x,y,z is always within a specific coordinate system
- For example, is it relative to the bottom left corner of the room, or the center of the robot?
- It is far easier to reason in an appropriate coordinate system
- As long as there are easy ways to convert back and forth.
Coordinate systems
- Pose = position and orientation
- Pose is always with respect of a specific coordinate frame or TF
Natural Coordinate system
- Usually a coordinate begins as the “natural” way to think about It
- Angle of obstacle, with respect to the LIDAR
- Position a corner, with respect to the whole room
- Angle to turn, from the point of view of the robot itself
- So when you see phrases like “with respect to”, and “from the point of view of” you know these refer to coordinate frames.
What is the natural TF hierachy?
- It is very common to want to see that same point or angle from another’s point of view
- How much do I have to turn to point directly away from the wall?
- What direction is the nearest door from me?
- How do I drive in the direction of the fiducial?
- Compare starboard/port and driver vs. passenger side
TF
- TF package in ROS is central
- It recently was rewritten and shows up as TF2 in many places
- It is interesting and important to understand in some more detail
TF framework in ROS
- An API to make conversions of coordinates between systems easy and efficient
- Coordinate systems are given names, e.g. “world” or “lidar-1”
- They are organized into a tree
- Every named tf has just one parent, and unlimited number of children
TF broadcasts
- Any node can report on the relationship between two coordinate system
- Generally this is a node who knows something about one or the other.
- For example, the node that moved the arm, can report the new relative position
- That is, to get from tf “a” to tf “b”, add add 10 to the x or rotate 180 degrees around z.
- TF Listeners
- If my node needs to interpret coordinates I might listen to tf messages
- Allowing to convert coordinates between any two coordinate frames.
TF CheatSheet
Lets look at some code
$ sudo apt-get update
$ sudo apt-get install ros-noetic-turtle-tf2 ros-noetic-tf2-tools ros-noetic-tf
$ sudo apt install evince
$ roslaunch turtle_tf2 turtle_tf2_demo.launch
- Notice that as you use the cursor keys to teleop the orange turtle around, the grey one follows right on it’s heels!
High Level explanation
- Code is using tf2 to create three coordinate frames: one for the “world”, and one each for the two turtles
- Realize that if we give turtle1’s coordinates as x,y, we’d still need to say, in what coordinate frame those were.
- In t1’s coordinate frame, t1’s coordinates are always 0,0!
$ rosrun tf2_tools view_frames.py
$ evince frames.pdf
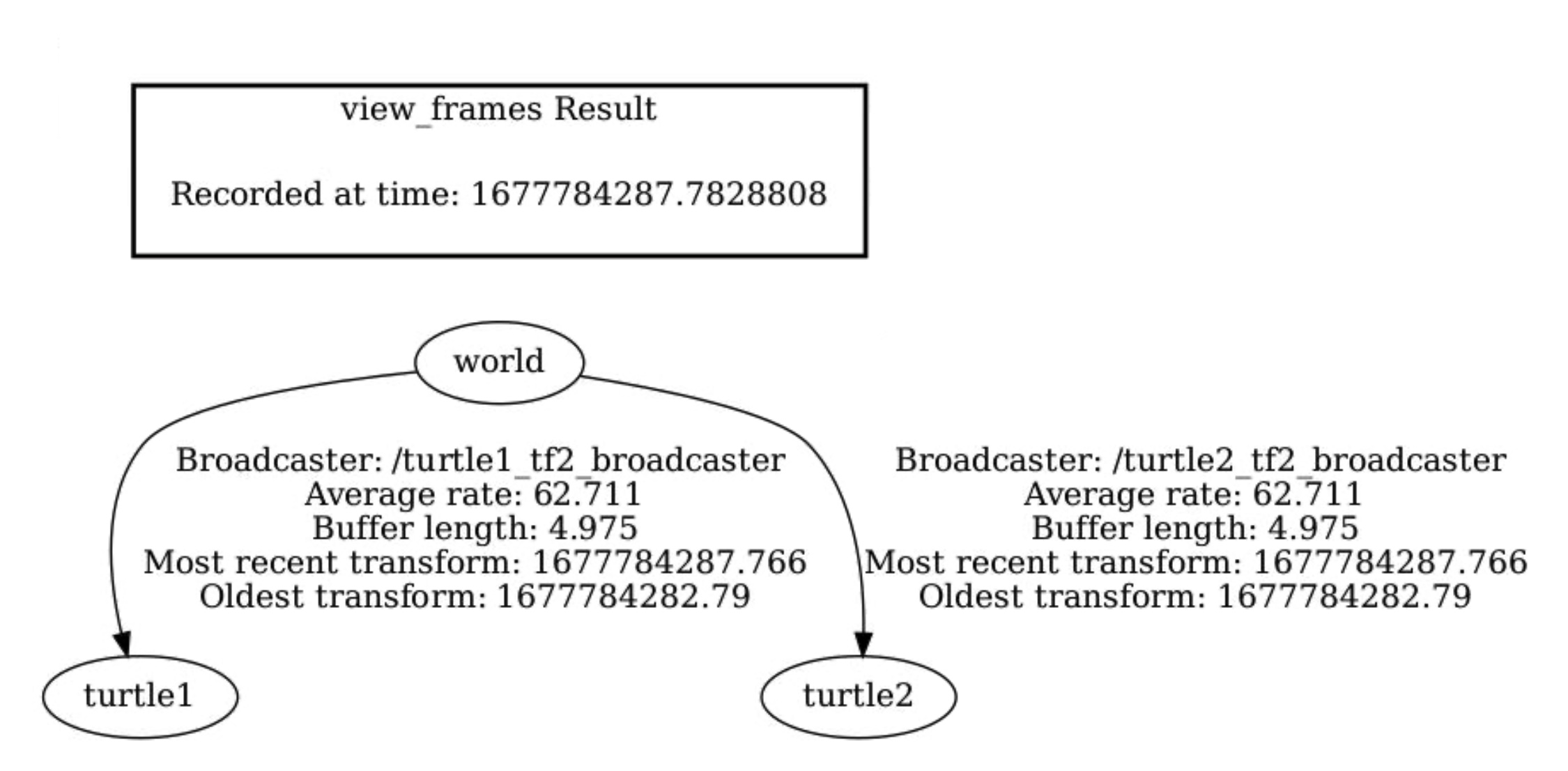
- See the three coordinate frames and their hierarchical relationship
- The diagram doesn’t display the actual transform just the relationships
- To see those we need to echo the transform:
$ rosrun tf tf_echo turtle1 turtle2
At time 1677784974.758
- Translation: [0.000, 0.000, 0.000]
- Rotation: in Quaternion [0.000, 0.000, -0.200, 0.980]
in RPY (radian) [0.000, 0.000, -0.402]
in RPY (degree) [0.000, 0.000, -23.046]
$ rosrun tf tf_echo turtle1 world
rosrun tf tf_echo turtle1 world
At time 1677785078.262
- Translation: [-5.544, -5.544, 0.000]
- Rotation: in Quaternion [0.000, 0.000, 0.000, 1.000]
in RPY (radian) [0.000, -0.000, 0.000]
in RPY (degree) [0.000, -0.000, 0.000]
- You can see the transform needed to get from turtle1 to turtle2 is different from the one between turtle1 and world. Why is that?
Visualization
$ rosrun rviz rviz -d `rospack find turtle_tf2`/rviz/turtle_rviz.rviz
- You now visualize all three tfs. Why do two move and one stay still?

Lets see how all this works: tf2_broadcaster
- Examine the code in
samples:
- tf2_demo_launch
- turtle_tf2_broadcaster.py
- turtle_tf2_listener.py
$ roslaunch samples tf2_demo.launch
$ rosrun tf tf_echo /world /turtle1
- Only one turtle so far!
- Notice that it is publishing turtle1’s
tfs relative to world
- Drive around and notice that it is updating turtle1’s pose and also a transform
$ roslaunch samples tf2_demo.launch
$ rosrun tf tf_echo /world /turtle1
$ rosrun tf tf_echo /world /turtle2
tf2 frames are organized in a tree
$ rosrun tf2_tools view_frames.py
$ evince frames.pdf
- Notice, there are no cycles, one root
- This ensures that there’s only one path from one frame to another
- Which ensure that we can compute the transform by following that path
- New frame would be added as a child of an existing frame
- How to decide what the parent frame should be?
- Its the one that has the most obvious and simple transform
- TFs have names which help you understand what physical component it is tied to
- TFs for mobile robots follow a typical hierarchy as follows: map -> odom -> base_link
base_link for the “center” of the robot. You get to pick it but it should make some intuitive sense. All other parts of the robot are below base_link hierarchically in the tf tree- Sometimes it’s useful to have another TF which is the center of the footprint of the robot, meaning, a TF projected straight down from base_link and intersecting with the ground plane wherever that is.
odom for the odometry created TFmap for the TF of a map built by hand or through slam- Conventional names and standards for TFs can be found here: (https://www.ros.org/reps/rep-0105.html)
- TFs are fundamental to understanding anything relating to positions in ROS.
- TFs are built on a hierarchical system of relative positions between different parts of a robot or different objects in the world.
- The base_link is the “center” of the robot. You get to pick it but it should make some intuitive sense.
- TFs allow all other parts of the robot to be described as a relative position to either the base_link directly or to other parts on the robot.
- Odometry is simply measuring the transform between the base_link and the origin point of the odom tf (usually the position at which the robot started).
- Continuing the example from before, lets say I need to know the relative positions of the hand on our robot and an lever in the world.
Thank you. Questions? (random Image from picsum.photos)
(random Image from picsum.photos)