Reminder: “Readings” are your responsibility. You will be expected to come to class prepared, having read the material, and ready to participate in the discussion
Robot Hardware
- Subsystems are ‘represented’ in the software
- Locomotion (e.g. wheels)
- Actuation (e.g. arms)
- Sensing (e.g. cameras, lidar, buttons, encoders)
- Computing (e.g. single-board computer SBC, microcontroller)
Locomotion
- Holonomic - non-Holonomic
- Holonomic - can move in any direction
- Non-holonomic - can’t move in any direction
- Degrees of freedom
- Ambiguity in defining DoF
2 wheeled vehicles
- Differential drive: Turtlebot3, Platform, Bullet, Branbot
- Turning by different speed on two or more wheels
- Sometimes there is a caster
- Can only move forward and backward or pivot in place
4 wheeled vehicles
- Not up and down or (directly) sideways
- With more than 2 wheels, or a track - skid steering
- Cars have “Akkerman” steering (4 wheels, 2 that can steer)
- 4WD “Mechanum” steering
Quadruped
- Gait - trot, gallop, etc
- Sensing vs. Non Sensing issues
Common case: Differential drive
Lower Level
- Subscribes to
cmd_vel
- Desired translation and rotation speeds
- Reverse kinematics tells us desired rotations per second for each wheel
- Publishes to
odom
- Forward kinematics tells us estimated actual motion (position and speed)
- ‘Dead Reckoning’
Supporting hardware
- Two wheels + 1 or 2 casters
- Each wheel has motor and encoder
- Motor will go “faster” when given more current
- Encoder counts up for each rotation
Algorithm
- PID control to minimize delta between desired and actual
- Forward kinematics
Sensors
Lidar
- Rotates and uses a laser to measure distance to nearest obstacle
- Returns a vector of values corresponding to the directions
- LiDAR’s can operate in 2d (scan) or 3d (point cloud), ours is 2d
Limitation Operates in a plane, like a disk. Can't detect an obstacle above or below the plane!
Visual Cameras
- Webcam sees a color picture
- Matrix of dots, each dot has a color
Dot[x,y] = {r,g,b}- Data can be processed for example with
opencv
- A lot of data and a lot of processing
- Bandwidth limits
Depth Cameras
- Like a Microsoft Kinect
- In addition to
{r,g,b} also has distance so we get {r,g,b,d}
- Useful for getting range measurements of an object detected through camera
Computation
- Distributed environment, typically:
- roscore running onboard. on Raspberry pi
- Some additional ROS nodes running on Raspberry Pi
- More ROS nodes running on a laptop or other computer
- Workload is truly distributed across all of those
- Eventually we may have to have a much beefier computer running all three
- This would make the robot much more independent
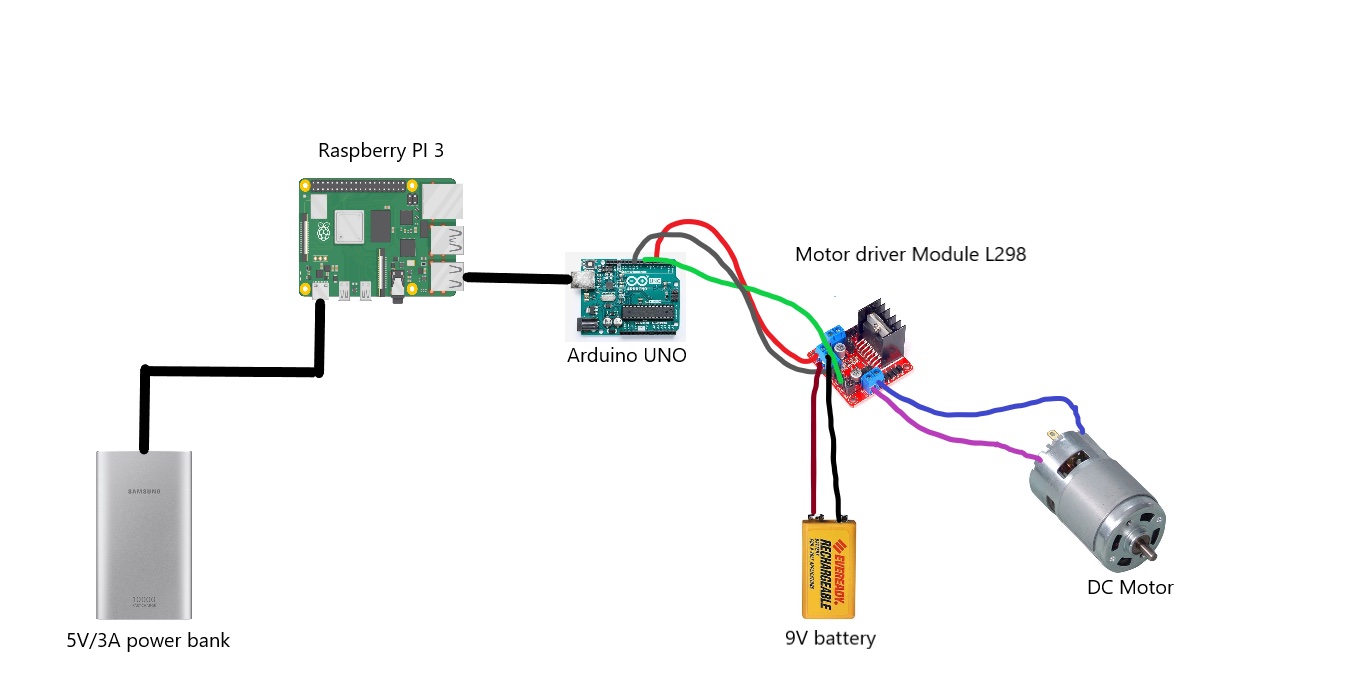
Our actual Robots
- Differential Drive - 2 powered wheels and one (or two) casters
- Arduino or Arduino-like computer to control the motor.
- Motor Controller and IMU directly connected to Arduino
- Raspberry Pi which runs Ubuntu and ROS, connected to Arduino via a USB cable
- Lidar connected to Raspberry Pi connected via USB cable
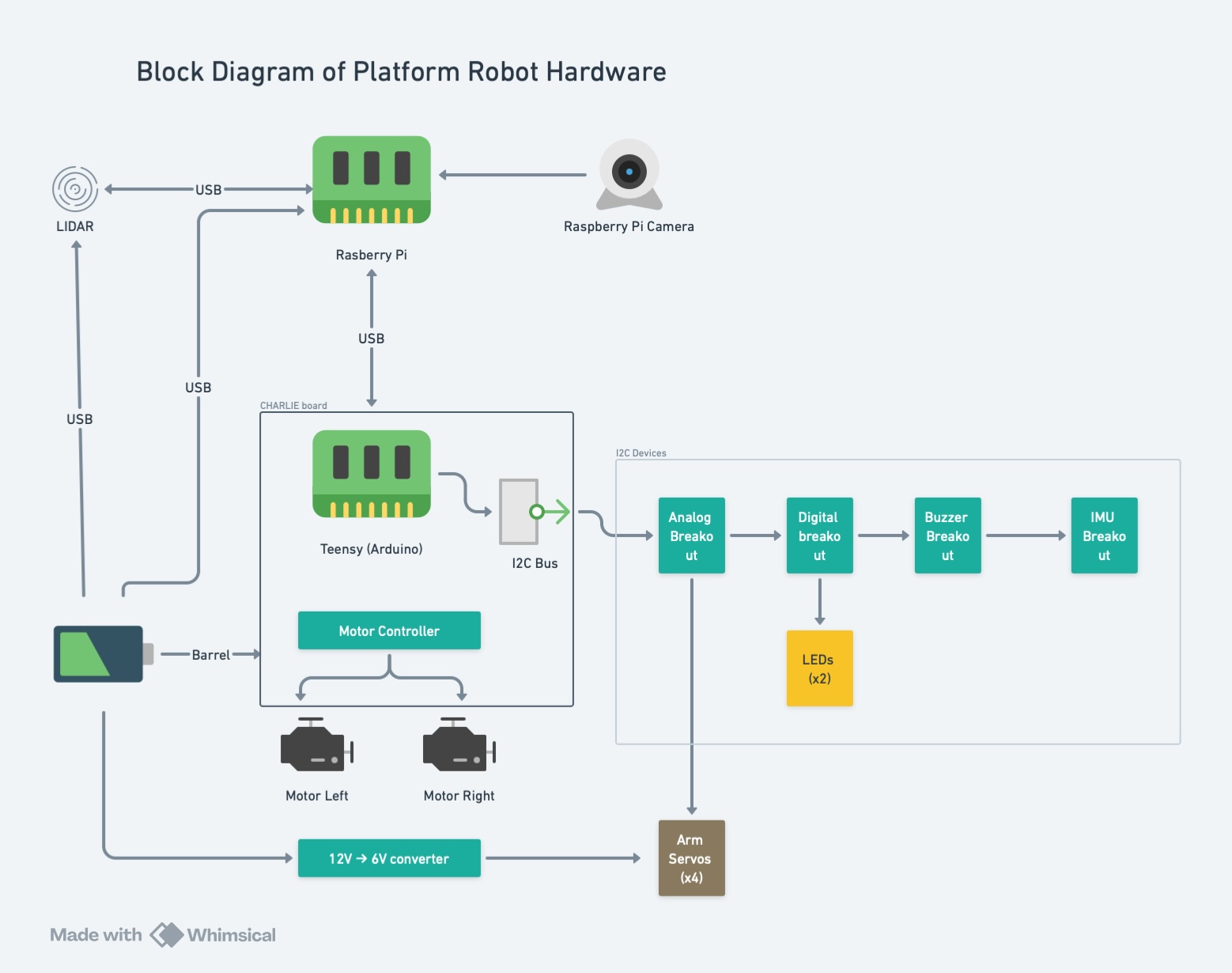
Diagram
Thank you. Questions? (random Image from picsum.photos)
(random Image from picsum.photos)